In 2024-2025, during my graduate program at the University of Massachusetts Lowell, I worked with professor Hugo Akitaya and several other students on research into self-reconfiguring modular robots. Our work was published and presented at the 41st International Symposium on Computational Geometry in June of 2025.
This short video from MIT neatly explains what modular robots are, and shows prototype modular robots in action. To summarize: modular robots are small machines, typically cube-shaped, which can:
There are different models for how modular robots may reconfigure themselves. In the "sliding model", modules can slide along other modules freely, with no rotation of the shape. In practice, however, real-world modular robots follow the "pivot model", where modules "pivot" around the edges of other modules. This restricts the motion of the modules!
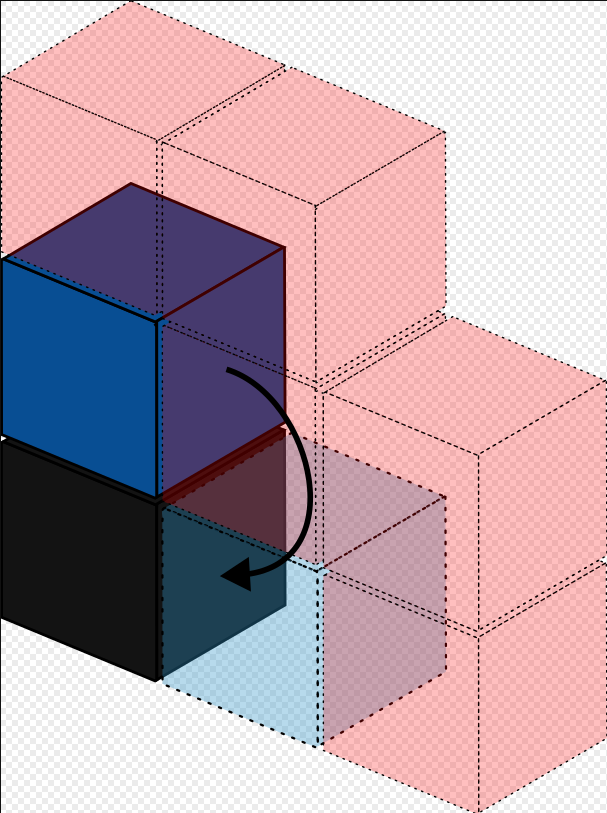
In the example below, under the pivoting model, the blue module can pivot around the black module to reach the shaded-blue region. However, if there were any modules present in the shaded-red regions, the blue module could not follow the shown path; its motion would be blocked by the presence of the other modules.
Our research focused on two areas in modular robotics research:
My role in this research was to develop accessible visualization tools to help with both debugging and showcasing our work. I first wrote an interactive C++ application which rendered "scenarios" using OpenGL (with the help of GLFW). I then ported this application to JavaScript and WebGL (on top of three.js) under the name "WebVis".
WebVis has since evolved into the "Modular Robotics Web Tool" with additional functionality, such as built-in scenario creation and pathfinding. This version can be found on the UML Modular Robotics Group's GitHub page. WebVis itself is integrated into this page below! The controls are:
Under "Display Settings", the camera style can be changed between perspective (default) and orthographic projections. The "Example Scenarios folder contains a handful of pre-defined sequences to check out. You can also create and upload your own scenario using the file selector in the top left; scenarios are just text files with a specific format.
Most research into modular robotics assumes cubic modules. However, other shapes are possible; see the Rhombidodecahedron Showcase and Catom Showcase example scenarios.